數(shù)字孿生,英文名為DigitalTwin(數(shù)字雙胞胎),簡單而言,便是在一個設備或系統(tǒng)的基礎上,創(chuàng)建一個數(shù)字版的“克隆體”。而本文將為大家著重介紹數(shù)字孿生的技術框架及其在智慧交通領域的應用。
1、數(shù)字孿生技術框架
數(shù)字孿生技術框架可分為三個層級,即數(shù)據(jù)接入層、計算仿真層和應用層。
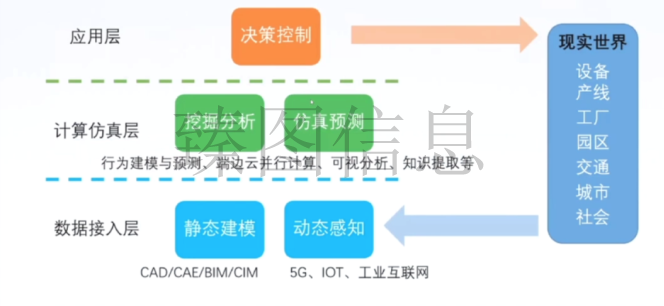
第一個層級是數(shù)據(jù)接入層,主要是指通過靜態(tài)建模和動態(tài)感知來獲取數(shù)據(jù),創(chuàng)建一個基本的客觀世界的鏡像模型。感知可分為兩大類:第一類是靜態(tài)感知,常用的是CAD/CAE/BIM/CIM技術,如對城市環(huán)境的靜態(tài)部分進行建模;第二類是動態(tài)感知,這個是較為關鍵的一點。動態(tài)感知的發(fā)展,實際上得益于物聯(lián)網(wǎng)、互聯(lián)網(wǎng)技術的發(fā)展,諸如工業(yè)互聯(lián)網(wǎng)、5G甚至未來6G技術的不斷發(fā)展。在這些技術的支持下,可以更全面、及時地實現(xiàn)對客觀環(huán)境的狀態(tài)感知。
第二層是計算仿真層,主要是包含發(fā)掘分析和仿真預測兩個方面,是為數(shù)字孿生上層應用提供技術支持的關鍵層級。一方面,要對靜態(tài)和動態(tài)感知所獲取數(shù)據(jù)的初級模型進行深層次發(fā)掘,創(chuàng)建更高層的知識模型,即發(fā)現(xiàn)一些規(guī)律、分布和關聯(lián),獲取出更高層語義的知識。另一方面,運用這些知識去做仿真演算,進而能夠為上層應用實現(xiàn)——通過現(xiàn)實的把握來預測未來。
第三層是應用層,數(shù)字孿生的核心應用是決策和控制。在現(xiàn)實中,一系列改造現(xiàn)實世界的過程可以認為是一種實施策略,或是看成一種決策。通過應用數(shù)字孿生系統(tǒng),可以在眾多平行世界中通過推演來檢驗我們的策略和決策是否合理,再進一步運用各類智能優(yōu)化技術,不斷迭代改進策略和決策,最后再通過控制系統(tǒng)來實施策略和決策,影響改變現(xiàn)實世界的PhysicalTwin(物理雙胞胎),進而構成“感覺-決策-控制-感知”——物理與數(shù)字的孿生世界之間信息流動閉環(huán)。
2、數(shù)字孿生技術
模擬出智慧交通最優(yōu)解,數(shù)字孿生將怎樣賦能智慧交通?結合實際場景詮釋數(shù)字孿生技術在提升無人駕駛訓練效率、助力交通事故分析和交通管控等方面的應用價值。
1)提升無人駕駛訓練效率
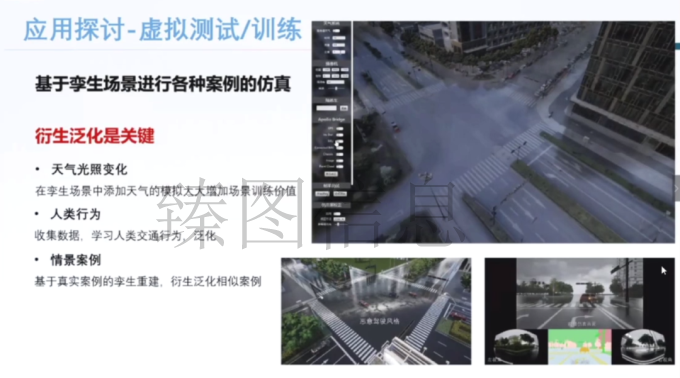
現(xiàn)階段,智能研究中心正在展開智能無人駕駛虛擬訓練系統(tǒng)研究,為無人汽車駕駛算法的道路駕駛安全性和智能駕駛能力提供開放式的虛擬測試與訓練平臺。該項目的目標是把現(xiàn)實交通情景在數(shù)字空間中復現(xiàn),通過泛化衍生技術為無人汽車營造一些極端環(huán)境和臨界的高危情景,大幅度提升無人駕駛訓練的效率。
基于對靜態(tài)、動態(tài)數(shù)據(jù)的感知,我們可以創(chuàng)建數(shù)字孿生模型,實現(xiàn)基于孿生數(shù)據(jù)的情景再現(xiàn),幫助無人汽車進行虛擬測試和訓練。但僅對情景高逼真的數(shù)字孿生是不夠的,更重要的是對孿生情景進行衍生和泛化,不斷豐富無人汽車的測試情景。衍生泛化是數(shù)字孿生技術的關鍵,既要來源于現(xiàn)實,也要高于現(xiàn)實,對現(xiàn)實情況作出一些改變。在系統(tǒng)開發(fā)中也基于孿生情景進行了各類案例的泛化仿真,比如說增加天氣變化、人類駕駛行為和情景案例的泛化。舉個情景案例泛化的例子,我們對大貨車軋人的事故情景進行仿真,但做好模型之后就是一個固定的情景,即車輛在固定時間到達固定位置。這個時候就需要做一些智能化的處理,比如說提高車速,或者增加交通參與者等,使得情景案例與真實情景較為相似又有所不同。
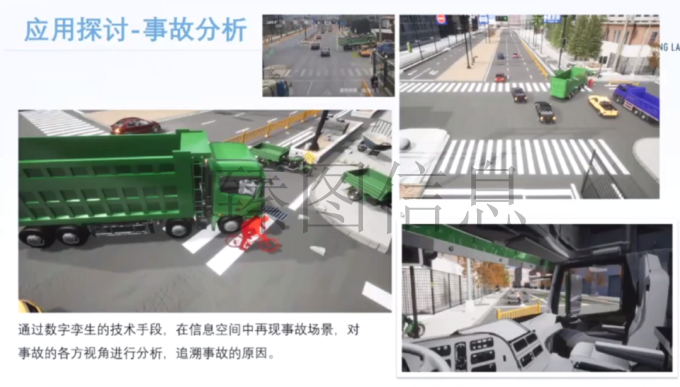
2)交通事故分析
同樣以貨車交通事故為例。一旦追蹤并復原事故情景環(huán)境以及交通參與者的軌跡后,就可以從多個角度去觀察事故發(fā)生的過程。通過定格處理,可以從車內(nèi)角度發(fā)現(xiàn),貨車司機實際上完全看不到有人騎著自行車經(jīng)過。因此,數(shù)字孿生技術在交通事故分析情景下有很大的應用價值,能夠幫助追溯、分析事故發(fā)生的具體原因,找出責任人。
3)交通管控
運用數(shù)字孿生技術,模擬出城市交通的狀況,再通過評估推演來優(yōu)化交通管控的策略,這是數(shù)字孿生賦能智慧交通的重要應用場景。其主要涉及到四個層面的功能:
一是監(jiān)控和發(fā)現(xiàn)。通過數(shù)字孿生系統(tǒng),可以創(chuàng)建一個信息獲取及控制的閉環(huán),實現(xiàn)全過程掌控。更重要的是,在一個非常龐大復雜的場景中,可以及時發(fā)現(xiàn)一些關鍵問題并及時作出處理。比如說,進入秋冬時節(jié),安徽高速部分路段團霧天氣頻發(fā),團霧具有能見度低、突發(fā)性強、氣象預報困難的特點,易引發(fā)交通事故。運用數(shù)字孿生技術,可以通過對動態(tài)感知數(shù)據(jù)進行實時檢測,及時發(fā)現(xiàn)團霧產(chǎn)生并出示警示。
二是推演和預測。在掌握數(shù)據(jù)后,可以對一些參與者創(chuàng)建微觀行為模型,再通過對大量交通參與者Agent進行仿真計算,獲得宏觀的模擬結果,推演事態(tài)的發(fā)展,實現(xiàn)預測功能。
三是評估和優(yōu)化對策。通過大規(guī)模并行計算,可以同時評估眾多平行世界的仿真結果。再通過強化學習等技術,不斷完善交通管控方案。
四是歷史追溯和復盤研究。當一個事件發(fā)生了之后,我們可以運用數(shù)字孿生系統(tǒng)去復原這件交通事故發(fā)生的全過程,探究當時的每一步應對是否做得足夠好,是否具備改善空間。這是數(shù)字孿生技術的一個特殊能力。
3、數(shù)字孿生技術展望
首先,伴隨著5G、6G甚至更高級的通信技術的發(fā)展,加上端-邊-云的協(xié)作計算,可以提高數(shù)字孿生的實時性,甚至可以不依賴高精地圖,實時地對未知領域進行建模。其次,通過改善行為仿真和預測算法,可以讓行為預測的推演更為精準,算力更強的話,甚至可以一次性地推演更多的平行世界。再者,伴隨著V2X技術的發(fā)展,交通參與者的類型會更多,場景也會更復雜,怎樣能將仿真做得更好,也是非常值得研究的方向。最后,在實時決策、遠程操控個體方面,對整個孿生系統(tǒng)的要求會更高。比如說數(shù)據(jù)能否實時、安全地傳輸?shù)皆贫撕秃蠖耍ㄟ^態(tài)勢感知,把操控命令再傳回到物理世界,這個過程要做得足夠快,而且更需要數(shù)據(jù)的傳輸過程安全穩(wěn)定。融入?yún)^(qū)塊鏈等相關技術,是使得這個信息閉環(huán)過程實現(xiàn)安全穩(wěn)定的一種可探索的解決方案。