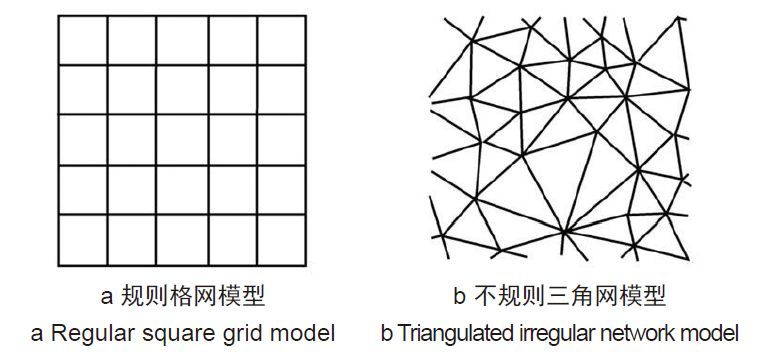
三維GIS是在二維GIS的基礎上發展起來的新興科技,它提升了空間數據在二維平面圖中簡單表現的拘束,保持了GIS系統的三維智能化,擁有更為精確的量測剖析、更為形象化的展現實際效果和更為高效率的信息化管理,在新型智慧城市、工程建筑、考古學等行業擁有更為普遍的運用。綜合性考慮到三維模型的生產制造難度系數、高效率和成本費,在三維GIS平臺中,地貌、等高線模型通常選用不一樣的方式 單獨搭建,因而擁有不一樣的數據構造和特性。以三維地貌模型特征分析,依據組成模型網格圖種類的不一樣,三維GIS地貌擁有標準網格模型和不規律三角網模型之分。而三維等高線模型創建的方式 更為多種多樣,能夠 根據三維激光器掃描儀、傾斜攝影精確測量、技術專業的三維三維建模軟件或三維GIS系統等獲得。在三維GIS平臺中為考慮地貌、等高線模型模型在精密度、視覺、查尋等各層面的規定,必須開展等高線與地貌三維模型間的結合,即根據對三維模型的粘貼和修復,做到界限光滑且紋路拼湊當然的實際效果,最終融合成全新的三維大數字模型。
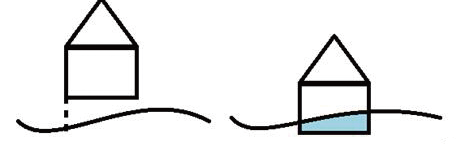
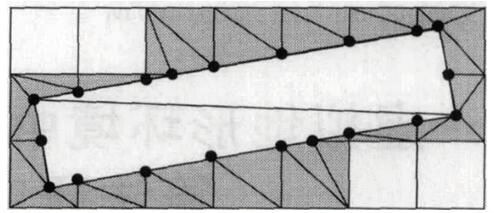
地貌模型與等高線模型結合較早的科學研究起源于1996年,MichaelF.Polls等就根據幾何圖形置入的方法,將矢量素材路面數據融進地貌網格中,可是該路面模型自身并不具備波動形狀,僅僅做為矢量素材數據存有,并且沒有處理動態性LOD(LevelofDetail,LOD)地貌模型轉變難題。近幾年來,針對三維模型結合層面的關鍵難題取決于三維GIS系統中,等高線模型通常依據水準基準點創建,而標準網格地貌根據有波動特點的DEM(DigitalElevaionmodel,DEM)創建,進而造成結合后的二種模型中間出現不配對的狀況,典型性的就是說等高線模型飄浮于地貌模型之中或是等高線模型一部分掩藏在地貌模型之中,如下圖所示。以便處理這一難題,胡璐錦、劉小標、李強等專家學者依據地貌網格圖種類的不一樣,將三維GIS地貌分成標準網格地貌和不規律三角網地貌來各自科學研究相對的模型結合;也有一部分專家學者則將等高線模型歸類,分為單獨于地貌網格圖和取決于地貌網格圖的兩大類等高線模型,并進一步細分化為斑點狀等高線、條帶條狀等高線及其面狀等高線,明確提出了根據地貌更新改造和根據等高線更新改造的不一樣結合方式 ,具備象征性的有王光霞、劉寧、萬剛等。以便有利于訪問,AnupamAgrawal,AngelikaWeber、MichaelF.Polls、陳國軍等人到原來三維模型結合的基本上又添加了對多尺度地貌模型的結合科學研究,健全了三維數據結合后的LOD展現科學研究。
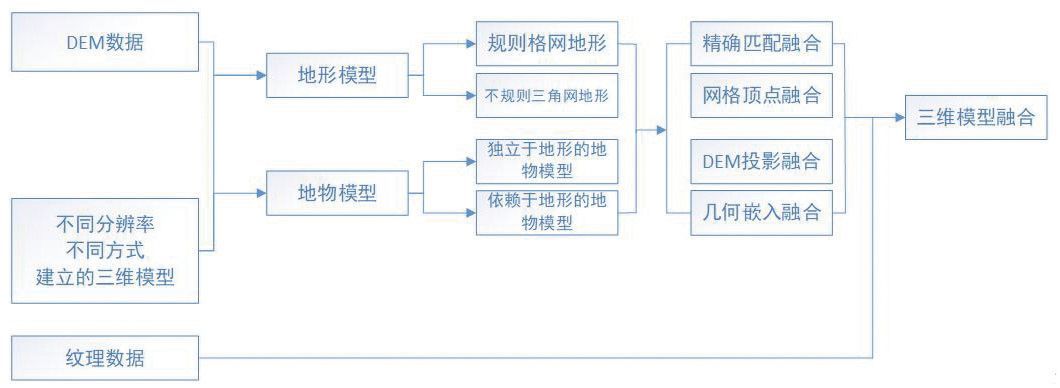
文中對地貌模型與等高線模型的結合方式 開展了系統歸類如下圖所示,對近些年明確提出的各種各樣三維數據結合方式 干了小結和簡評,并探討了根據傾斜攝影精確測量模型結合行業碰到的難題和將來的發展前途。
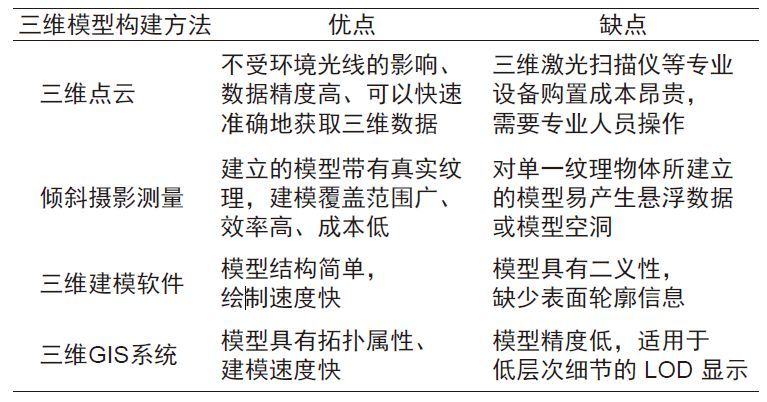
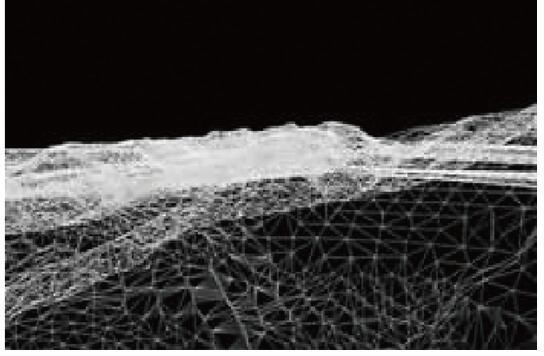
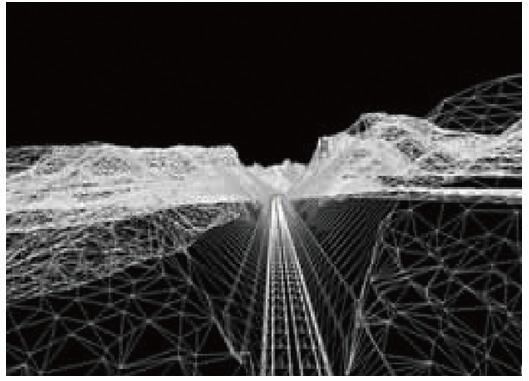
普遍的三維模型搭建方法有4種,見下圖一:其一是根據主動型收集的三維云數據數據,歷經去噪、修復、斜面線性擬合等全過程創建三維模型,如下圖二所示;其二是根據傾斜攝影相片的主動式的深層重新構建,創建三維模型;其三是應用三維三維建模軟件,如三dMAX、Maya等手機軟件,根據給出的幾何圖形信息內容及拓撲信息內容制做三維模型,如下圖三所示;最終一種是運用三維GIS系統設計方案在CityEngine或ArcGIS手機軟件內創建帶有室內空間拓撲關系的三維模型,如下圖四所示。
圖一
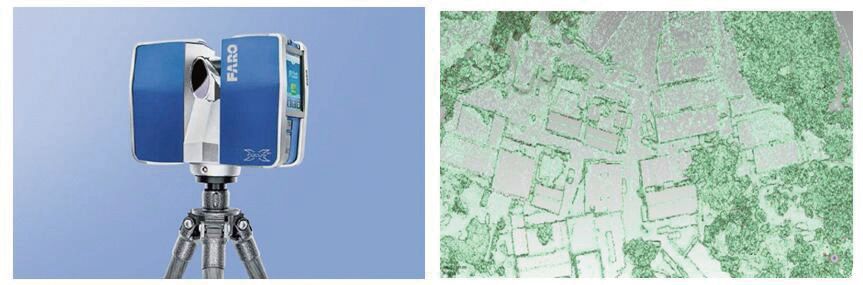
圖二

圖三
圖四
標準網格模型與不規律三角網模型是地貌模型的二種關鍵表達方法。標準網格模型是由尺寸固定不動且含有座標(表述室內空間部位)的方形網格圖組成,每一網格圖中的數字意思標高。其優勢是數據構造簡易,有利于應用和管理方法;缺陷是數據規模大,在地形輕緩地域易出現數據冗余數據,而在地貌繁雜地域則沒法不錯地反映地形波動,像素較低。
不規律三角網模型是以不規律遍布的數據點轉化成持續的三角形面來靠近地貌表層,能夠 較大 水平地復原土層微小的波動,不錯在意地形特征,因而又被稱作“斜面數據構造”。對比于標準網格模型,不規律三角網模型中端點遍布具備任意性,因而不規律三角網地貌模型可以高精密仿真模擬繁雜的地貌表層,并有數據數據冗余小,儲存高效率,合適多層面表述等特性。可是數據構造和應用管理方法都很繁雜,數據儲存量很大,且針對歪曲或旋轉的斜面不可以非常好地表述。
2單獨于地貌的等高線模型與地貌模型的結合
單獨于地貌的等高線模型(如植物群落、工程建筑模型),結合可簡化為室內空間部位配準。其結合的方法關鍵有二種:一是對地貌模型自身未作改動,立即配準等高線模型并累加,這類方式 簡易,但結合后非常容易出現模型中間裂縫;另一種方式 是對地貌網格圖模型開展剪裁,根據更改地貌界限來融入等高線模型,促使二者能夠 密不可分結合,這類結合方式 精準度較高。因而,現階段對單獨的等高線模型,多選用適度改動地貌模型的方式 保持三維模型結合。
2.1精準配對結合法
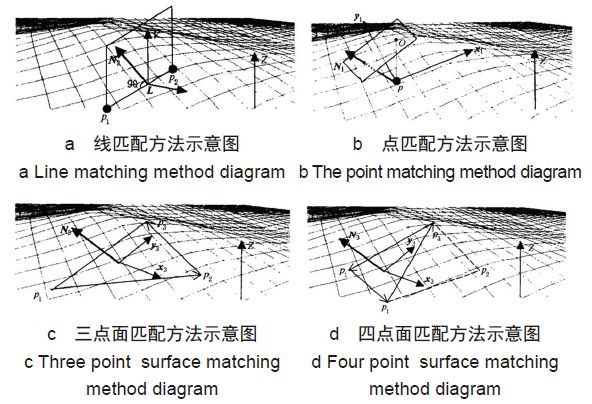
在單獨等高線模型與標準網格地貌模型的結合中,典型性的有工程建筑模型與地貌模型的結合。根據更新改造等高線模型或更新改造地貌模型,互相融入來做到模型結合。該方式 采用將工程建筑模型往下拓寬,直至模型所遮蓋地貌的最少處;或將初始地貌開展相對性房屋建筑底邊拉升填低的觀念來做到結合實際效果。其本質是等高線模型與地貌模型在室內空間部位上的精準配對,并根據適度改動地貌模型來融入等高線模型的融進。王愛愛、張錦采用了二種結合計劃方案:一是對等高線模型開展改動:以等高線模型基準點為規范,結構模型基準點下列一部分,補足與地貌模型中間的裂縫,做到結合實際效果;二是對地貌模型開展改動:將房屋建筑模型隸屬地區內地貌標高設定為同一標值,隨后將房屋建筑底邊界限網格開展剖分,并融進地貌網格保持模型結合。2004年,宋漢辰等明確提出了四點配對的方式 ,將選擇的關鍵環節投射到地貌表層,依據不一樣的聚焦點、調節引流矩陣等基本信息,在情景中顯示信息模型的即時姿勢,確保了視覺上的模型結合,如圖所示6圖示。但這類方式 事實上是一種視覺上的模型配對,三維模型并沒有具體結合。在這里結合基本上,ArneSchilling等科學研究并完成了在虛擬現實技術的網絡服務器下,用不一樣LOD關鍵點層級來表達繁雜的三維因素,進一步保持了三維模型的LOD顯示信息。陳國軍、陳慶剛根據拓展轉變單元格像素,針對特點物輪廊,選用更加細致的標準三角形來敘述,并與聚焦點有關的LOD簡單化技術相結合,來做到三維模型結合的目的。
該類結合方式 對初始三維模型干了修改,結合后的模型在測量精度上面遭受一定危害。并且針對不一樣像素三維模型中間的數據結合,該類方式 是不是仍然合理,希望有關專家學者的進一步科學研究。
2.2網格端點預結合法
網格端點預結合法是事先將等高線模型和地貌模型均以網格端點或云數據的方法表現出來,運用云數據取樣或是管束地區刪掉網格端點的方式 在云數據方面結合等高線模型與地貌模型,最終將結合好的網格端點統一搭建不規律三角網(TriangulatedIrregularNetuwork,TIN)做到結合實際效果。
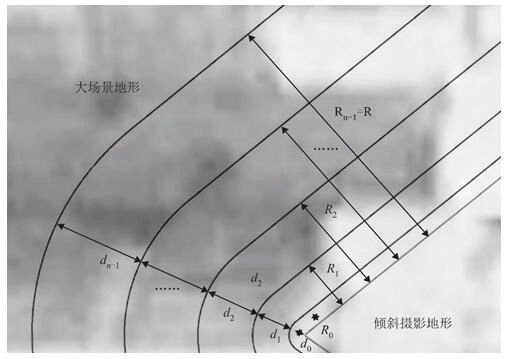
專家學者李林在統一座標架構下,將預結合等高線模型底平面圖兩者之間所屬的地貌看作一體,二者的標高數據都可以視作地貌標高。那樣,只需刪掉等高線模型底平面圖內危害模型結合的標高數據,再運用Delauney三角網優化算法轉化成TIN模型仿真模擬地貌,就可以保持地貌模型與等高線模型的結合。耿中元等則采用了創建結合堆棧,并運用傾斜攝影地貌模型取代堆棧內初始地貌模型的方式 來做到模型的結合,如下圖一、圖二所示。最先分離出來出傾斜攝影創建的含有小量地貌數據的等高線模型,在其中小量的地貌數據應用云數據表達,等高線模型則應用不規律三角網(TIN)表達。在結合堆棧內,應用傾斜攝影創建的小量地貌云數據模型取代初始地貌云數據模型,并依照二種地貌模型不一樣的云數據相對密度,根據等差數列獲得取樣間距,保持了取樣相對密度的慢慢銜接。最終將結合好的地貌云數據模型運用Delauney三角網優化算法統一結構,保持傾斜攝影等高線模型與地貌模型的結合。
圖一
圖二
運用結合后的云數據數據再度轉化成不規律三角網,做到模型的結合是網格端點結合的主要特點。但因為原來的云數據數據在數據結合全過程中干了刪減,再次轉化成的不規律三角網也會遭受相對的危害。非常是根據傾斜攝影精確測量創建的含有真正紋路的三維模型,因為模型結合后再次轉化成的不規律三角網較以前的單獨模型不規律三角網發生了轉變,原來的紋路投射標準早已已不適用結合后的三維模型,因而,會出現紋路空白頁、失幀等難題。這也是在無人飛機航測技術性發展趨勢迅速的今日,根據無人飛機航空攝影精確測量創建的含有真正紋路的三維模型結合全過程中,必須進一步科學研究的難題。
3取決于地貌的等高線模型與地貌模型的結合
取決于地貌的等高線就是指這類等高線與地貌的關聯比較密不可分,他們絕大多數包鑲于地貌模型中,可從地貌模型中分化出去,與地貌的波動邁向密切相關,結合時要考慮到對地貌模型的危害。這一類模型的等高線包含路面、江河、湖水、大規模植物群落等,該類等高線模型與地貌模型的結合搭建全過程事實上就是說對不規則圖形開展三角剖分的全過程。
針對取決于地貌的等高線模型,可依據其幾何圖形形狀及本身界限范疇內標高值的不同點分成二種:
1)面狀遍布:本身界限范疇內標高值同樣,如湖水、大規模植物群落等。
2)條帶條狀遍布:本身界限范疇內標高值不一樣,如路面、江河等。
3.1DEM網格剪裁結合法
對于第一種面狀遍布的等高線模型,結合的觀念是根據DEM的投射。最先,獲取面狀等高線遮蓋地區內全部等高線的標高,并求平均值,該平均值即做為這一地區的標高值H,接著對該地區不規則圖形開展三角剖分。隨后,投射該不規則圖形到二維平面圖上,并與地貌模型DEM網格的平面圖投射求相交點,相交點的標高值仍賦為H。最終,以網格圖為企業,對投射重合一部分開展裁掉與運算,將剪裁后的不規則圖形再度三角剖分,對剖分后三角形的端點賦以相對的標高,那樣就保持了面狀等高線模型與地貌模型的結合。
對于第二種條帶條狀遍布的等高線模型,因為對地貌模型的危害更大,結合的觀念是以等高線模型與地貌模型的網格圖相交點開展插值三角剖分,如下圖所示。以路面模型特征分析,用路面模型的封閉式不規則圖形界限與DEM網格圖求相交點,并將全部相交點插進DEM網格中,隨后對有相交點的DEM網格三角剖分產生不規則圖形。最終,DEM網格圖中目前數據的剖分,再加路面的簡易剖分,就可以保持與地貌模型的結合。2006年王光霞等又在這個基礎上對結合前后左右的地貌模型開展數據分析,明確提出了結合優化算法的相關精密度鑒定,健全了該種類模型的結合方式 ,并被業界普遍選用。
運用更新改造地貌模型或是等高線模型的方式 能夠 做到二者在三維數據方面的結合,并在視覺上擁有優良的感受。可是該類方式 對三維模型開展了過多的人為因素干涉,更改了模型原來的規格尺寸,在精細化管理測繪工程方面,結合后的模型精密度稍顯不夠,尚需根據接下去的科學研究進一步提高。
3.2幾何內嵌式結合法
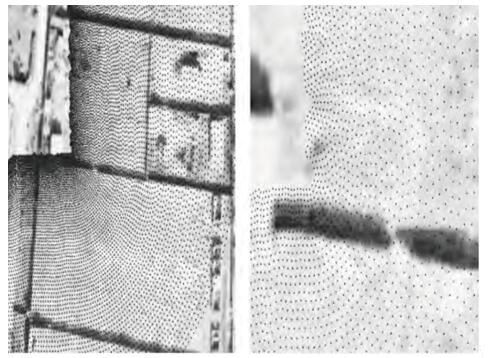
幾何內嵌式結合是讓等高線模型以網格圖的方式置入到地貌模型中保持結合,其基礎觀念是將等高線模型的輪廊不規則圖形置入地貌模型不規律三角網中,依據不規則圖形的危害范疇,以不規則圖形界限為管束,搭建含有線性組合的Delaunay三角網,來保持等高線模型與地貌模型的結合。朱娟在解決路面模型與地貌結合的全過程中,將路面模型視作一個或好幾個不規則圖形,選用網格圖數據庫索引和方位線段等方式 ,改善了地貌數據機構方法和路面界限的獲取優化算法。隨后以路面界限做為線性組合,搭建含有線性組合的Delaunay三角網并置入地貌模型中,最終刪掉路面界限不規則圖形內的地貌三角形,來保持路面與地貌的結合,如下圖一、圖二所示。尹小君等則以工程建筑模型為研究對象,根據獲取房屋建筑路面輪廊做為對地貌模型的危害范疇,制訂TIN地貌模型的限制線性組合,進而保持地貌模型與等高線模型的三維集成化。
圖一
圖二
應用這類方式 結合后的江河、路面、水面等等高線模型通常僅僅干了簡易的三角剖分,模型的彎折、波動等特點特性遭受了一定的危害。
4 結語
文章內容梳理了近些年三維數據結合在地貌等高線模型中的運用與發展趨勢,依照單獨于地貌和取決于地貌的兩類等高線模型,對每一類地貌等高線模型間的三維數據結合方式 與研究成果干了小結,并梳理了典型性等高線模型與地貌結合廣泛選用的結合方式 。近些年,伴隨著航空公司傾斜攝影精確測量的發展趨勢,運用無人飛機航測創建的三維模型以其低成本、高效率、模型內置真正紋理貼圖的特性被銷售市場普遍認同。但受無人飛機類型、航高、及其其所配用拍攝服務平臺的危害,根據航空公司傾斜攝影精確測量創建的三維模型具備像素不一致、模型材質貼圖紋路光源不勻稱等特性。怎樣精確結合該類多像素不規律三角網模型,并維持其原來的真正紋路光源勻稱,模型界限銜接當然,尚需有關專家學者進一步的科學研究。而隨著著三維模型精密度的持續提高,三維模型結合后的精密度也需進一步提高。因而,三維模型的結合必須借助精細化管理測繪工程技術性,并與地理信息系統及人工智能算法科學研究緊密結合,在多源三維數據高精密無縫拼接結合中開展更為長遠的科學研究。